


 |
| Arriba: Gael y Samuel. Abajo: Elisa e Irene |

 |
| ¡Sumergidos en el desafío! |

 |
| Última vez todos juntos: FLL Canarias 2019, Into Orbit |
 |
| Reencuentro 2024: Yazmín, Laura, Luis, Rocío, Pablo, Álex y Tony |
Esta temporada se libera el desafío el martes 6 y en el siguiente video se describe el Juego del Robot y sus reglas:

 |
| M01: Granja de coral / M04: Buzo |
 |
| M02: Tiburón |
 |
| M03: Granja de coral |
 |
| M05: Pez linterna / M14: Recolecta las muestras (Tridente) |
 |
| M06: Levanta el mástil / M07: Tesoro del Kraken |
 |
| M08: Hábitat artificial |
 |
| M09: Encuentro inesperado |
 |
| M10: Envía el sumergible |
 |
| M11: Descubrimiento por sonar |
 |
| M12: Alimenta a la ballena |
 |
| M13: Cambia la ruta de navegación |
 |
| M14: Recolecta las muestras (Plancton) |
 |
| M14: Recolecta las muestras (Agua) |
 |
| M14: Recolecta las muestras (Fondo) |
 |
| M15: Barco de investigación |





 |
| M03 - Arrecife de coral |
 |
| M01 - Granja de coral |
 |


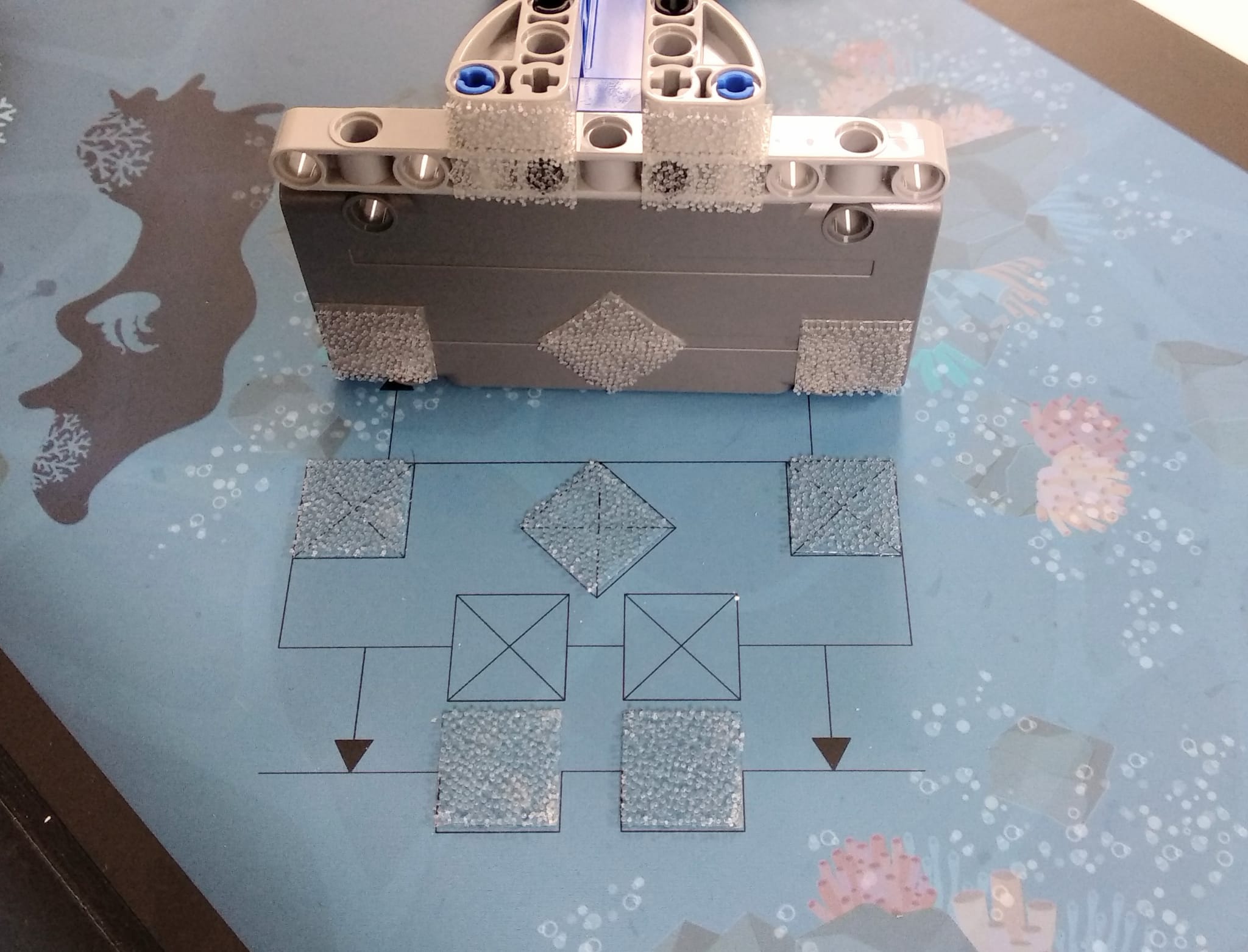
En la misión 10 (la del sumergible) hemos hecho con lego un soporte para montar la otra mitad (la que iría sobre la otra mesa). Después de filmar nuestro video tutorial lo modificaremos para que no sobresalga de la mesa y levárnoslo por delante 😅








 |
| Durante las tomas falsas |



En el Juego del Robot, hemos empezado a diseñar y construir los accesorios para dar de comer a la ballena (M12) y mover el barco de investigación (M15) hasta el otro puerto, algo un poco complicado al tener en medio el hábitat artificial.





 |
| Pared de 19 mm de grosor |
 |
| Pared de 38 mm de grosor |


 |
| Anterior sede del Oceanográfico. Se trasladó por la caída de una avalancha de rocas. |
 |
| Mitad de mandíbula inferior de una ballena. |

 |
| Basura recogida en una playa cercana durante una mañana. |






 |
| Irene programando en Python su salida |





Y el sábado charlamos con el equipo marroquí Omar Robotics, que al día siguiente tenían su regional clasificatorio. Esperamos que les haya ido muy bien 😍
















2º Premio Ingeniera Soy al ganador – Brilliant Minds
3º Premio Universidad de La Laguna al ganador – Curiosity Lobsters
Premio Parque Científico y Tecnológico de Tenerife al ganador – Codifica Futuros
Primer Premio a los Valores FIRST – Britalego
Segundo Premio a los Valores FIRST – Legos Alzados
Tercer Premio a los Valores FIRST – Tech Titans
Primer Premio al Proyecto de Innovación – Skynet1
Segundo Premio al Proyecto de Innovación – Cintegra 4
Primer Premio al Diseño del Robot – Curiosity Neptunes
Segundo Premio al Diseño del Robot – SanRobotics
Primer Premio al Comportamiento del Robot – Aldeatrón Robotix
Segundo Premio al Comportamiento del Robot – Brilliant Minds
Premio a las Jóvenes Promesas – Pearl
Premio a la excelencia en Ingeniería – Cintegra
Premio al Compañerismo Extraordinario – Curiosity Penguins
Premio al Emprendimiento – Futuro Robotic
Primer premio al Entrenador/a – Codifica Futuros
Segundo Premio al Entrenador/a – RA Subaquatic
National Innovation Award – Futuro Robotic

















 |
| Tony con Amaia y Juanma |
 |
| Aterrizando en A Coruña |



 |
| Terminada nuestra primera y mejor partida, junto a Legotronic Beavers |
 |
| Esperando nuestro turno y revisando accesorios |




 |
| Preparando la inspección en nuestra 2ª partida con GRAT Anunciata |





Luego desmontamos el stand a toda prisa para poder llevar todo al piso de Irene y Samuel, que estaba muy cerca, antes de la foto de familia, la fiesta y el paseo hacia el Auditorio de Ferrol, donde se celebró la ceremonia de clausura.

{kind=link}

 |
| De camino a la ceremonia de clausura con GRAT Anunciata |

 |
| Recibiendo las medallas |

Primer Premio Ingenier@Soy al
Ganador – Aldeatrón Robotix (Tenerife) – WORLD FESTIVAL FIRST LEGO League
(Houston).
Segundo Premio Universidade da Coruña al Ganador – FSIngenium Team
(Navarra) – WORLD FESTIVAL FIRST LEGO League (Houston).
Tercer Premio Ingenier@Soy al
Ganador – Legotronic Beavers (Navarra) – WORLD FESTIVAL FIRST LEGO League
(Houston).
Primer Premio Concello de Ferrol a lo Valores FIRST – Manao Ikaika (Bellaterra) – OPEN FIRST LEGO League (Massachusetts).
Segundo Premio a los Valores FIRST – Legolàctics (Linars del Vallès) OPEN FIRST LEGO League (Florida).
Tercer Premio a los Valores FIRST – Invictus (Valencia) OPEN FIRST LEGO League (Ciudad del Cabo).
Premio National Innovation Award – Legolàctics (Linars del Vallès).
Primer Premio Xunta de Galicia al Proyecto de Innovación – Legokide 1
(Vitoria – Gasteiz) OPEN FIRST LEGO
League (Grecia).
Segundo Premio al Proyecto de Innovación – TECNODIVER BERRIO-OTXOA (Bilbao) OPEN FIRST LEGO League (Ciudad del Cabo).
Tercer Premio al Proyecto de Innovación –
Captioma Elementas (Ourense) OPEN FIRST LEGO League (Sidney).
Primer Premio Diputación de A Coruña al Diseño del Robot – Robotech
(Golmes) OPEN FIRST LEGO League
(California).
Segundo Premio al Diseño del Robot – Electronic Falcons (Fuente Álamo) OPEN FIRST LEGO League (Ciudad del Cabo).
Tercer Premio al Diseño del Robot – Hydrogyrios (Palma).
Primer Premio al Comportamiento del Robot – Robotech (Golmes).
Segundo Premio al Comportamiento del Robot – Electronic Falcons (Fuente
Álamo).
Tercer Premio al Comportamiento del Robot – Legotronic Beavers (Navarra).
Primer Premio Nuevas Promesas – Pinkblack Villaeuropa (Móstoles).
Segundo Premio Nuevas Promesas – La Pokeckase (Valderubio).
Primer Premio a la Excelencia en Ingeniería – ADS Seabotix (Artesa de
Segre).
Segundo Premio a la Excelencia en Ingeniería – Sedna (Barcelona).
Primer Premio al Emprendimiento – GandiaLab Team (Gandía).
Segundo Premio al Emprendimiento – Codifica Futuros (Las Palmas).
Primer Premio a la Motivación Excepcional – GRAT- Anunciata (Tudela).
Segundo Premio a la Motivación Excepcional – SEB-BOT (Cartaya).
Primer Premio al Compañerismo Extraordinario – LIZEOBOTS (Donostia).
Segundo Premio al Compañerismo Extraordinario – GRAT- Anunciata (Tudela).
Primer Premio al Entrenador/a – TECNODIVER BERRIO-OTXOA (Gijón).
Segundo Premio al Entrenador/a – Jatta Printi (Bellaterra).
Tercer Premio al Entrenador – JM BILBO (Bilbao).




 |
| El equipo Codifica Futuros desde Las Palmas 💖 |
 |
| Con el equipo Brilliant Minds 😍 |



 |
| Perfect! |
%20%F0%9F%A4%96_%20El%20que%20tiene%20ni%C3%B1os%20y%20adolescentes%20en...%20-%20Jos%C3%A9%20Domingo%20Regalado%20_%20Facebo.png)





 |
| FSingenium Team, Legotronic Beavers y Robotech |


En el que tendremos que resolver problemas relacionados con la Arqueología.






















.png)




.jpeg)




2025 Competing Team List


El de la partida de práctica también el sábado:



Se podrán ver las ceremonias y partidas de robot a través de este canal
Quedamos en séptimo
lugar en el ranking general (casi finalistas).
Fuimos reconocidos como el Tercer mejor Diseño del Robot.
Las puntuaciones en las 4 partidas oficiales: 535, 485, 535, 405,
siendo décimos en el ranking del robot.
DÍA 1 –
miércoles 11/06/25
Vuelo de Iberia TFN – MAD – BOS, alquiler de furgón en el aeropuerto y noche en Boston.
 |
| La expedición en TFN antes de emprender la aventura internacional |
 |
| La bestia…parece que no había nada más pequeño 🚍 |
 |
| Nuestro hogar en Boston…con obras como despertador 😅 |
DÍA 2 –
jueves 12/06/25
Visita al MIT (Boston), desplazamiento de Boston a Worcester
y recogida de material en el Worcester Polytechnic Institute (WPI): 2 cajas
para transportar robot y material de proyecto y stand, y un perchero para
colgar el rollup, en el que mostramos nuestros proyectos en el stand y en la
sala de jueces. Preferimos no facturar equipaje, por lo que tuvimos que
encargar dicho material online en una tienda local para que lo enviaran
directamente al WPI.
 |
| Una costa increíble...y el tiempo acompañaba |
 |
| No
podía faltar la visita al EM-AI-TI (Massachusetts Institute of Technology) |
 |
| El recorrido turístico por el MIT |



 |
| Nuestro hogar en Worcester, a 10 min del WPI en coche |
DÍA 3 – viernes 13/06/25
¡Empieza la fiesta! Registro, montaje de stand, visita a los demás equipos y
prácticas de robot en las mesas oficiales. Ceremonia de apertura con
presentación de equipos.


 |
| ¡Listos para el gran evento! El símbolo del WPI es la cabra montesa |
 |
| Orgullosos de representar a Canarias y España |


 |
| Ambiente en los stands...como una feria de turismo |
 |
| Prácticas en las 16 mesas oficiales. En las partidas jugaban 8 equipos simultáneamente |
 |
| El fundador de FIRST, Dean Kamen, no podía faltar al evento en la Uni donde inició su carrera 😍 |
 |
| Una presentación de equipos espectacular durante la ceremonia de apertura |
 |
| Los vascos Tecno Divers |
 |
| Las catalanas Manao Ikaika |
 |
| Ambientazo en la grada |
 |
| Nuestra mascota nunca puede faltar... |
 |
| ...y la Macarena tampoco 😂 |
 |
| Haciendo amigos 😍 Había 23 países representados y 108 equipos (73 estadounidenses) |


DÍA 4 – sábado 14/06/25
Reunión de entrenadores, presentación de proyectos a los
jueces y partida de práctica oficial (410 ptos). Fiesta de la amistad.
 |
| Presentación de nuestro proyecto ScuBasket. Solo dejaron entrar a nuestro entrenador con nosotros |
 |
| Presentación de nuestros robots Aqua y Ocean Force |
 |
| Fiesta de la Amistad.... |
 |
| ... y de la comilona también 😋 |
DÍA 5 – domingo 15/06/25
Cuatro partidas oficiales durante la mañana y ceremonia de
clausura con reconocimiento al Diseño del robot como finalistas.
 |
| A punto estuvo de caer un máximo de 620 ptos |
 |
| Estamos muy contentos con el comportamiento de Aqua Force |
 |
| El inesperado aunque merecido reconocimiento 🎉🎉 |
.jpeg)



DÍA 6 – lunes 16/06/25
Vuelta de Worcester a Boston, compra de Crumble cookies para
familiares y devolución de furgón en el aeropuerto. Vuelo de vuelta en Iberia BOS
– MAD – TFN (llegada martes 17 a las 10:30, tras 20 horas de viaje de casa a casa).
 |
| Las cookies hicieron honor a su nombre, porque llegaron bastante “crumbled” |
 |
| ¡Hasta la próxima Boston! |






 |
| Con Raquel Morales, concejala de Educación y Juventud del Ayto de Granadilla |













.jpeg) |
| En el IAC-80, primer telescopio en descubrir una estrella enana marrón |

 |
| Tamaño real del espejo primario del GTC, equivalente a uno circular de 10,4 m (La Palma) |
 |
| Experimento con cámara IR en el Centro de Visitantes |
.jpeg) |
| El telescopio MONS, donde Tony hizo sus prácticas de Astrofísica hace unos añitos |





.jpeg)
.jpeg)